
Kurze Antwort: Die RK3588 im Vergleich zum Jetson Orin Nano Die Entscheidung hängt von drei Faktoren ab – Budget, Software-Ökosystem und Bereitstellungsumgebung. Die ieeker YKR-RK3588 Entwicklungsboard kostet 40–50% weniger als ein Jetson Orin Nano-System, läuft mit 5–8 W kühler als das Jetson-System mit 15–25 W und deckt alle industriellen Schnittstellen ohne zusätzliche Hardware ab. Der Jetson Orin Nano Super liefert 67 TOPS gegenüber den 6 TOPS des RK3588 und bietet das CUDA-Ökosystem von NVIDIA – die richtige Wahl, wenn Ihr Team bereits TensorRT-Pipelines einsetzt oder große Sprachmodelle am Edge bereitstellen muss. Für die meisten industriellen Bildverarbeitungs-, IoT-Gateway- und eingebetteten HMI-Anwendungen ist der YKR-RK3588 die richtige Entscheidung hinsichtlich des Preis-Leistungs-Verhältnisses.
Die RK3588 im Vergleich zum Jetson Orin Nano Der Vergleich der Plattformen ist die häufigste Entscheidung, vor der Ingenieure stehen, wenn sie im Jahr 2026 den Umfang eines Edge-AI-Projekts festlegen. Beide Boards zielen auf denselben Anwendungsbereich ab – Computer Vision, Robotik, intelligente Gateways und industrielle KI-Inferenz –, vertreten jedoch grundlegend unterschiedliche technische Philosophien: Rockchip ist auf einen kosteneffizienten industriellen Einsatz optimiert; NVIDIA hingegen auf KI-Durchsatz und die Tiefe des Entwickler-Ökosystems.
Dieser Leitfaden bietet Embedded-Ingenieuren und Hardware-Produktmanagern eine direkte, kriterienweise Aufschlüsselung der RK3588 im Vergleich zum Jetson Orin Nano Abwägungen – CPU-, GPU- und NPU-Durchsatz, Stromverbrauch, industrielle Schnittstellen, Software-Ökosystem, Stücklistenkosten sowie Überlegungen zur Produktionsbereitstellung –, damit Sie die richtige Plattformentscheidung treffen können, bevor das Budget für den ersten Prototypen bewilligt wird.
Wichtigste Erkenntnisse
- RK3588 im Vergleich zum Jetson Orin Nano bei der NPU: 6 TOPS (RK3588) gegenüber 67 TOPS (Jetson Orin Nano Super) – Jetson liegt beim reinen KI-Durchsatz um das 11-Fache vorn
- Der RK3588 punktet beim Stromverbrauch: typischerweise 5–8 W gegenüber 15–25 W beim Jetson Orin Nano – ein entscheidender Faktor für passiv gekühlte Industriegehäuse
- Das Entwicklungsboard YKR-RK3588 kostet bei Großabnahme 40–50% weniger als ein vergleichbares Jetson Orin Nano-Seriensystem.
- Der RK3588 verfügt über 4× simultane Display-Ausgänge, einen nativen CAN-Bus, SATA und zwei GbE-Anschlüsse – dem Jetson Orin Nano fehlen alle vier Funktionen von Haus aus
- CUDA + TensorRT + JetPack ist der entscheidende Vorteil von Jetson: Dank des voroptimierten Container-Ökosystems von NVIDIA dauert die Modellbereitstellung nur noch Stunden statt Tage.
- Das RK3588 RKNN-Toolkit2 unterstützt die quantisierte INT8-Inferenz mit PyTorch/ONNX: Dies reicht für 95% an industriellen Bildverarbeitungs-Workloads bei deutlich geringeren Systemkosten aus.
- Für den Jetson Orin Nano gilt eine Kaufbeschränkung von vier Stück pro Konto – dies ist jedoch kein Produktionsfaktor; RK3588-Boards sind in großen Stückzahlen ohne Zuteilungsbeschränkungen erhältlich.
- Für den Einsatz generativer KI am Edge (LLMs, VLMs) ist der Jetson Orin Nano Super die einzige praktikable Option in dieser Preisklasse.
RK3588 vs. Jetson Orin Nano: Umfassender Vergleich der technischen Daten
Bevor wir uns der detaillierten Analyse zuwenden, finden Sie hier die vollständige Spezifikationsübersicht im direkten Vergleich für die RK3588 im Vergleich zum Jetson Orin Nano Vergleich. Die Werte für den Jetson Orin Nano entsprechen denen des aktuellen Orin Nano Super (8 GB) mit JetPack 6.2 im MAXN-Super-Modus.
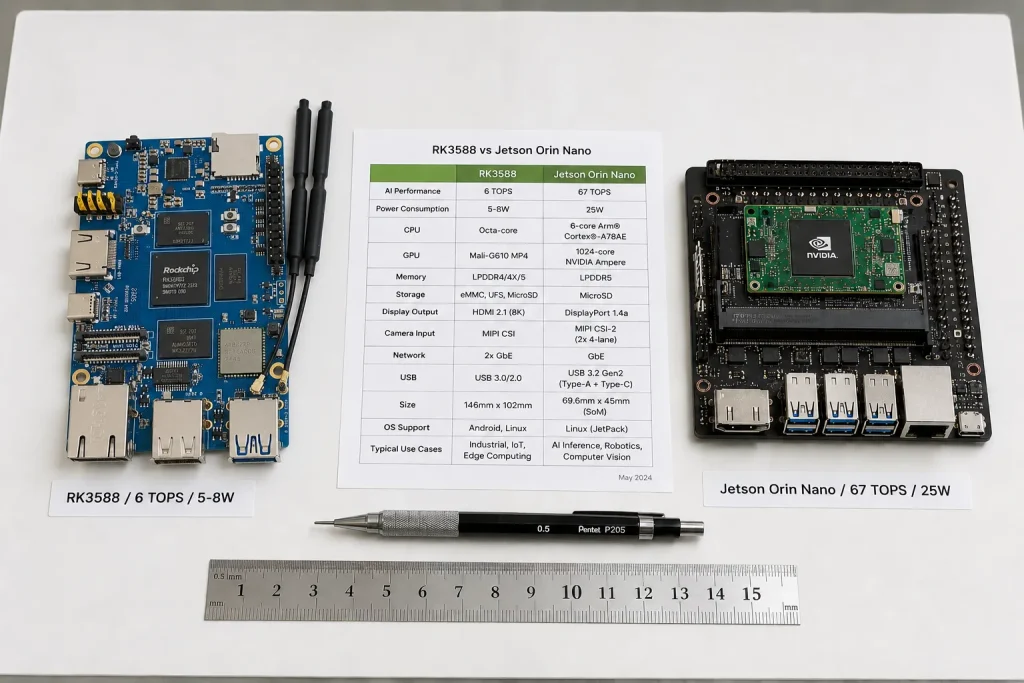
| Parameter | Rockchip RK3588 (ieeker YKR-RK3588) | NVIDIA Jetson Orin Nano Super (8 GB, JetPack 6.2) |
|---|---|---|
| CPU | 8-Kern 4× Cortex-A76 mit 2,4 GHz + 4× Cortex-A55 mit 1,8 GHz | 6-Kern-ARM Cortex-A78AE mit bis zu 1,5 GHz |
| GPU | Mali-G610 MP4 OpenGL ES 3.2, Vulkan 1.2, OpenCL 2.2 | NVIDIA Ampere-GPU 1024 CUDA-Kerne, CUDA 11.4+, TensorRT |
| NPU / AI-Beschleuniger | 6 TOPS (RKNN) | 67 Oberteile (Super-Modus) |
| Speicher | Bis zu 32 GB LPDDR4X | 8 GB LPDDR5 102 GB/s Bandbreite (Super) |
| Typische Leistung (Last) | 5-8W | 15–25 W (Super MAXN) |
| Videodekodierung | 8K H.265 bei 60 fps | 4K H.265 bei 60 fps |
| Anzeigeausgänge | Bis zu 4 gleichzeitig HDMI 2.1, DP 1.4, MIPI DSI ×2, eDP | 1 (DisplayPort nur im Entwickler-Kit) Für HDMI ist ein DP-Adapter erforderlich |
| Ethernet | 2× 2,5 GbE | 1× GbE |
| PCIe | PCIe 3.0 × 3 | PCIe 3.0 × 1 (M.2-Stecker M) |
| SATA / CAN / RS-485 | SATA III ✅ / CAN ✅ / UART ✅ | Von Haus aus nicht ❌ |
| Preis des Entwickler-Kits | ~$120–160 (YKR-RK3588) | $249 (NVIDIA UVP) |
| Produktionsmengenbegrenzung | Keine Begrenzung | 4 Einheiten/Konto (Entwicklungskit) Separater Produktionsmodul-Pfad |
| Betriebssystem / Software-Stack | Linux (Buildroot/Debian/Ubuntu), Android 12 | JetPack (auf Ubuntu-Basis) CUDA, TensorRT, cuDNN, DeepStream |
67 TOPS vs. 6 TOPS: Was die NPU-Lücke tatsächlich für Ihr Projekt bedeutet
Die am häufigsten genannte Zahl in der RK3588 im Vergleich zum Jetson Orin Nano Der Unterschied liegt im Durchsatz der NPU: 67 Oberteile (Jetson Orin Nano Super im MAXN-Modus) im Vergleich zu 6 TOPS (RK3588). Auf dem Papier sieht das nach einem entscheidenden Sieg für Jetson aus. In der Praxis kommt es jedoch darauf an, ob Ihre konkrete Anwendung tatsächlich 67 TOPS benötigt – und für die meisten industriellen Embedded-Anwendungen ist dies nicht der Fall.
Hier sehen Sie, welche Leistung die 6-TOPS-NPU des RK3588 bei realen industriellen Inferenz-Workloads unter Verwendung des RKNN-Toolkit2 erbringt:
- Objekterkennung mit YOLOv5s (INT8): ~45 ms pro Bild bei einer Eingangsauflösung von 640 × 640 – etwa 22 fps. Ausreichend für die Fehlererkennung auf Förderbändern, die Gesichtserkennung bei der Zugangskontrolle und die Maschinenbildverarbeitung mit einer einzigen Kamera bei branchenüblichen Bildraten.
- Bildklassifizierung mit MobileNetV2 (INT8): ~12 ms pro Inferenz – ausreichend für eine hochwertige Hochfrequenz-Sortierung mit mehr als 80 Klassifizierungen pro Sekunde.
- Leichte Anomalieerkennung (LSTM, 128 Merkmale): Weniger als 5 ms pro Inferenz – geeignet für die vorausschauende Instandhaltung in Echtzeit bei Sensorströmen mit Abtastraten von 200 Hz.
- Multi-Stream-Inferenz (2 Kameraströme, jeweils YOLOv5s): ~48 fps insgesamt für beide Streams unter Verwendung der RKNN-Multi-Core-Planung – geeignet für Inspektionssysteme mit zwei Kameras.
Wo 6 TOPS wirklich nicht ausreichen – und wo die 67 TOPS des Jetson Orin Nano Super einen echten Mehrwert bieten: beim Ausführen von Transformer-basierten Bildverarbeitungsmodellen (ViT, CLIP), bei der Inferenz großer Sprachmodelle am Edge (Llama 3 8B, Phi-3 Mini), die Multi-Stream-Videoanalyse bei 4K-Auflösung oder die gleichzeitige Inferenz bei vier oder mehr Kameraströmen mit ResNet-50 oder größeren Backbones. Wie die Dokumentation von NVIDIA bestätigt, Der Jetson Orin Nano Super bietet im Vergleich zu seinem Vorgängermodell eine bis zu 1,7-fache Leistungssteigerung bei generativen KI-Modellen., wodurch Modelle wie Llama 3 und Bild-Sprache-Modelle ermöglicht werden, die auf einer NPU mit 6 TOPS schlichtweg nicht praktikabel sind.
Die praktische Entscheidungshilfe: Wenn Ihre Inferenz-Workload in den Rahmen von Modellen der YOLOv5-Klasse mit einstelligen fps-Anforderungen passt oder es sich bei Ihrer Edge-AI-Aufgabe eher um Klassifizierung oder Anomalieerkennung als um generative Inferenz handelt, ist die 6-TOPS-NPU des RK3588 ausreichend und der Kostenvorteil entscheidend. Wenn Sie LLMs, multimodale Modelle oder Multi-Kamera-Analysen mit hohem Durchsatz ausführen müssen, sind die 67 TOPS des Jetson Orin Nano Super wirklich unverzichtbar. Eine detaillierte Aufschlüsselung des Einsatzes der RK3588-NPU mit dem RKNN-Toolkit2 finden Sie in unserem RK3588 NPU Leistungsübersicht.
Stromverbrauch: Warum der Vergleich zwischen RK3588 und Jetson Orin Nano für Industriegehäuse von Bedeutung ist
Der Stromverbrauch ist bei industriellen Anwendungen nicht nur eine Randnotiz in einem Benchmark-Bericht – er entscheidet darüber, ob Ihr Gerät passiv gekühlt werden kann, wie groß das Netzteil sein muss und wie sich die Gesamtbetriebskosten über einen Einsatzzeitraum von fünf Jahren im Feld gestalten. Der RK3588 im Vergleich zum Jetson Orin Nano Dieser Unterschied ist erheblich und spricht in Anwendungsszenarien mit Industriegehäusen durchweg für den RK3588.
Bei typischen Edge-AI-Workloads – NPU-Inferenz bei einer Auslastung von 70% mit gleichzeitig laufenden Linux-Diensten – verbraucht der RK3588 5-8W Gesamtsystemleistung. Dies wird durch mehrere unabhängige Messungen bestätigt: Im Dauerbetrieb der NPU benötigt der RK3588 in entsprechend ausgelegten Gehäusen lediglich passive Kühlung, was den lüfterlosen Einsatz auf DIN-Schienen oder in IP65-geschützten Umgebungen unkompliziert macht. Der Jetson Orin Nano Super im MAXN-Modus nimmt bis zu 25 W — mehr als das Dreifache der Last des RK3588. Bei 15 W (Standardmodus) ist sie immer noch etwa doppelt so hoch.
Dies hat drei direkte technische Auswirkungen auf das industrielle Produktdesign:
- Machbarkeit einer passiven Kühlung: Der YKR-RK3588 kann in einem versiegelten, lüfterlosen DIN-Schienen-Gehäuse bei einer Umgebungstemperatur von bis zu 55 °C eingesetzt werden, ohne dass die Grenzwerte für die Sperrschichttemperatur überschritten werden. Der Jetson Orin Nano Super mit 25 W benötigt bei Umgebungstemperaturen über 35 °C eine aktive Kühlung – einen Lüfter oder eine Flüssigkeitskühlung –, was zusätzliche Kosten, Geräuschentwicklung und ein mechanisches Ausfallrisiko für das Produkt mit sich bringt.
- Dimensionierung der Stromversorgung: RK3588-Systeme lassen sich problemlos mit einem industriellen DIN-Schienen-Netzteil mit 12 V/1,5 A (18 W) betreiben. Der Jetson Orin Nano benötigt ein Netzteil mit 5 V/4 A oder 12 V/2 A und einer Nennleistung von mindestens 25 W – ein größeres und teureres Netzteil.
- Batteriebetriebene oder PoE-Anwendungen: Im Bereich der mobilen Robotik, bei Drohnen-Nutzlasten oder bei PoE-betriebenen Edge-Kameras ermöglicht die Leistungsaufnahme des RK3588 von 5–8 W Designs, die aufgrund des Leistungsbudgets des Jetson Orin Nano nicht realisierbar wären.

Aus der Fertigung: Warum sich ein taiwanesischer Hersteller von Bildverarbeitungssystemen für den RK3588 statt für Jetson entschieden hat
Vor etwa zehn Monaten haben wir gemeinsam mit dem Hardware-Team eines taiwanesischen Unternehmens für industrielle Bildverarbeitung an der Entwicklung einer neuen Generation von Oberflächeninspektionssystemen für die Leiterplattenfertigung gearbeitet. Ihr bestehendes System nutzte Jetson-Xavier-NX-Boards – solide Leistung, doch die Plattform wurde nicht mehr weitergeführt, und die Umstellung auf Jetson Orin NX bei gleicher Leistung hätte die Materialkosten ihres Systems um etwa $180 pro Einheit erhöht. Bei 400 Einheiten pro Jahr ergaben sich daraus zusätzliche jährliche Kosten in Höhe von $72.000, die ihre Produktmarge nicht auffangen konnte.
Ihre Inferenz-Auslastung: zwei 5-MP-GigE-Vision-Kameras, ein YOLOv5m-Modell zur Fehlererkennung mit 10 fps pro Kamera, das kontinuierlich in einem versiegelten Prüfschrank bei einer Umgebungstemperatur von bis zu 50 °C läuft. Ihre Anforderung war einfach: Wenn der YKR-RK3588 10 fps pro Kamera bei akzeptabler Fehlererkennungsgenauigkeit aufrechterhalten könnte, wäre der Wechsel aus wirtschaftlichen Gründen unumgänglich.
Wir haben innerhalb einer Woche zwei YKR-RK3588-Evaluierungsboards geliefert. Der ML-Ingenieur des Kunden quantisierte das YOLOv5m-Modell mithilfe des RKNN-Toolkit2 auf INT8 – der Vorgang dauerte drei Tage, einschließlich eines eintägigen Validierungsdurchlaufs zur Genauigkeitsprüfung, um sicherzustellen, dass das quantisierte Modell die Genauigkeit bei der Fehlererkennung über dem Schwellenwert von 98,51 TP3T beibehielt. Endgültige Leistung: 11,2 fps pro Kamera bei einer NPU-Auslastung von 851 TP3T, wobei die GPU parallel den GigE-Vision-Bildspeicher verwaltete. Die Genauigkeitsabweichung von FP32 zu INT8 betrug 0,31 TP3T – und lag damit deutlich innerhalb der Spezifikation.
Thermisches Ergebnis: Der YKR-RK3588 erreichte in seinem versiegelten Gehäuse bei einer Umgebungstemperatur von 50 °C unter Dauerlast eine Sperrschichttemperatur von 72 °C – was innerhalb des Nennbetriebsbereichs des RK3588 liegt, der ausschließlich mit einem passiven Kühlkörper betrieben wird. Ihr bisheriges Jetson Xavier NX-System hatte einen 60-mm-Lüfter benötigt, der aufgrund von Flusenverschmutzungen aus der Leiterplatten-Produktionsumgebung alle 18 Monate Wartungswarnungen auslöste. Durch das lüfterlose RK3588-Design entfiel dieser Wartungspunkt vollständig.
Mittlerweile wurden 320 Einheiten ihres überarbeiteten Prüfsystems ausgeliefert. Einsparung bei den Stückkosten im Vergleich zur Alternative „Jetson Orin NX“: $163. Jährliche Gesamteinsparung bei aktuellem Produktionsvolumen: $65.200. Die Modellmigration mit dem RKNN-Toolkit2 dauerte drei Ingenieurtage – ein einmaliger Aufwand, der sich bereits in den ersten beiden Produktionsmonaten vollständig amortisiert hat.
Industrieschnittstellen: Hier ist der RK3588 konkurrenzlos
Für Ingenieure, die die RK3588 im Vergleich zum Jetson Orin Nano Bei industriellen Anwendungen – IoT-Gateways, eingebettete HMI-Panels, NVR-Systeme, Knoten in der Fabrikautomation – ist der Vergleich der Schnittstellen ebenso wichtig wie der Vergleich der Rechenleistung. Der RK3588 wurde für industrielle Embedded-Anwendungen entwickelt; der Jetson Orin Nano wurde für die KI-Entwicklung und die Prototypenerstellung in der Robotik konzipiert. Dieser Unterschied zeigt sich in der Hardware.
Das ieeker YKR-RK3588-Entwicklungsboard bietet von Haus aus, ohne Erweiterungskarten:
- Zwei 2,5-GbE-Anschlüsse: Unabhängige MACs zur Trennung von LAN und WAN in Gateway-Bereitstellungen – das Jetson Orin Nano-Entwicklerkit verfügt nur über einen einzigen GbE-Anschluss.
- SATA III: Direkter Anschluss einer 2,5-Zoll-SSD für den lokalen Datenhistoriker – auf dem Jetson Orin Nano nicht verfügbar, sofern keine PCIe-SATA-Controllerkarte den einzigen M.2-Steckplatz belegt.
- CAN-Bus: Für die Kommunikation mit SPS, Aktoren und Fahrzeugbussen – erfordert einen USB-CAN- oder PCIe-Adapter am Jetson.
- Mehrere UART-/RS-485-Schnittstellen: Für die Abfrage über den Modbus-RTU-Feldbus sind USB-Seriell-Adapter am Jetson erforderlich, die zu zusätzlichen Latenzzeiten und Fehlerquellen führen.
- 4 gleichzeitige Bildschirmausgänge: HDMI 2.1 + DP 1.4 + 2× MIPI DSI für HMI-Konfigurationen mit mehreren Bildschirmen – Das Jetson Orin Nano-Entwicklerkit verfügt ausschließlich über einen DisplayPort-Ausgang (für HDMI ist ein Adapter erforderlich, wie von mehreren Nutzern berichtet wurde).
- PCIe 3.0 × 3: Ermöglicht den gleichzeitigen Betrieb eines 4G/5G-Modems, einer NVMe-SSD und eines zusätzlichen Peripheriegeräts – Jetson verfügt über einen PCIe 3.0 M.2-Steckplatz.
Eine detaillierte Beschreibung der Einsatzarchitektur des YKR-RK3588 in IoT-Gateway-Konfigurationen – Modbus-zu-MQTT-Stack, Mobilfunk-Uplink, Store-and-Forward-Design – finden Sie in unserem Anleitung zum industriellen IoT-Gateway RK3568; dieselbe Architektur gilt auch für den RK3588, der über eine höhere Rechenleistung für parallele NPU-Inferenz-Workloads verfügt.
RK3588 vs. Jetson Orin Nano: Software-Ökosystem und Toolchain für den Einsatz von KI
Der Unterschied im Software-Ökosystem zwischen RK3588 im Vergleich zum Jetson Orin Nano ist der wichtigste Faktor für Teams, denen eine schnelle Bereitstellung von KI-Modellen wichtiger ist als Hardwarekosten oder Energieeffizienz.
NVIDIA JetPack: Der Vorteil der schnellen Bereitstellung
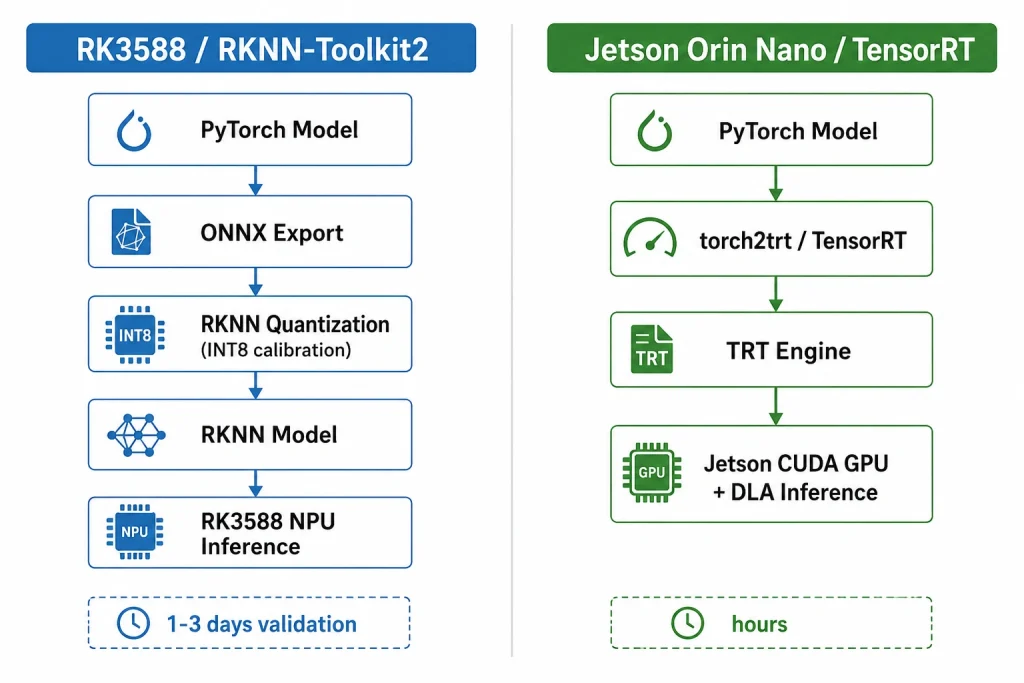
JetPack ist die einheitliche Softwareplattform von NVIDIA für Jetson – sie bündelt Ubuntu Linux, CUDA, cuDNN, TensorRT, DeepStream (Multi-Stream-Videoanalyse) und Isaac ROS (Robotik-Middleware) in einer einzigen SDK-Installation. Ein mit PyTorch trainiertes Modell lässt sich mit einem einzigen Konvertierungsbefehl auf TensorRT-optimierte Inferenz auf Jetson bereitstellen. Vorgefertigte Docker-Container für gängige Frameworks (Ultralytics YOLO, Hugging Face Transformers, NVIDIA Triton Inferenzserver) lassen sich direkt aus dem Container-Registry von NVIDIA ausführen, ohne dass eigene Build-Schritte erforderlich sind.
Speziell für Robotik-Anwendungen bietet NVIDIA Isaac ROS auf Jetson Orin Nano bietet hardwarebeschleunigte ROS-2-Knoten, Stereo-Tiefenverarbeitung und SLAM, deren Nachbildung auf dem RK3588 einen erheblichen Entwicklungsaufwand erfordern würde. Wenn es sich bei Ihrem Produkt um einen ROS-2-Roboter handelt, ist Jetson die richtige Wahl, sofern keine zwingenden Budgetbeschränkungen vorliegen.
RKNN-Toolkit2: Für den industriellen Einsatz geeignet, erfordert jedoch einen höheren Einrichtungsaufwand
Der Inferenzpfad des RK3588 — RKNN-Toolkit2 — konvertiert PyTorch-, TensorFlow- oder ONNX-Modelle in ein quantisiertes RKNN-Format, das auf der NPU ausgeführt werden kann. Der Arbeitsablauf ist gut dokumentiert und das Toolkit wird aktiv gepflegt, erfordert jedoch eine explizite Quantisierungskalibrierung (unter Bereitstellung eines repräsentativen Datensatzes für die INT8-Kalibrierung) sowie eine Validierung der Genauigkeit nach der Quantisierung. Dies ist ein einmaliger Aufwand von 1–3 Ingenieurtagen pro Modell und stellt keine wiederkehrenden Kosten dar.
Die wichtigsten Stärken des RKNN-Toolkit2 für den industriellen Einsatz: Das quantisierte RKNN-Modellformat ist in hohem Maße deterministisch (gleiches Inferenzergebnis bei jedem Durchlauf, keine Schwankungen bei der GPU-Planung), auf der RK3568-NPU trainierte Modelle lassen sich ohne Re-Quantisierung identisch auf der RK3588-NPU bereitstellen, und die RKNN-Python-API lässt sich nahtlos in OpenCV und SDKs für Industriekameras integrieren.
Die ehrliche Einschränkung: RKNN-Toolkit2 unterstützt Transformer-basierte Architekturen nicht so effizient wie TensorRT – Attention-Operationen in ViT- und LLM-Modellen werden teilweise auf der CPU statt auf der NPU ausgeführt, was den Durchsatz bei generativen KI-Workloads erheblich einschränkt. Wenn Ihre Anwendung LLM-Inferenz am Edge oder Vision-Language-Modelle erfordert, ist der CUDA- und TensorRT-Stack von Jetson die einzige praktikable Option in dieser Preisklasse.
Stücklistenkosten und Produktionsumsetzung: Die wirtschaftliche Realität
Der wirtschaftliche Kontext der RK3588 im Vergleich zum Jetson Orin Nano Die Entscheidung ist genauso wichtig wie der technische Vergleich, insbesondere für Teams, die Produkte auf den Markt bringen wollen, anstatt Prototypen zu bauen.
Entwicklungskit vs. Produktionskomponente
Das Jetson Orin Nano Super Developer Kit mit der Artikelnummer $249 ist ausdrücklich ein Entwicklungs- und Prototyping-Tool — NVIDIA begrenzt den Kauf auf vier Einheiten pro Kundenkonto für Forschungs- und Entwicklungszwecke. Für den produktiven Einsatz von Jetson-basierten Produkten müssen das reine Jetson Orin Nano-Modul (separat berechnet, in der Regel $150–200 bei Großbestellungen) sowie eine kundenspezifische oder von einem Drittanbieter stammende Trägerplatine und eine JetPack-Lizenz für kommerzielle Softwarefunktionen beschafft werden. Dies verursacht zusätzliche Entwicklungskosten, NRE-Kosten für die Trägerplatine und eine komplexere Lieferkette im Vergleich zur direkten Bestellung von Produktionsmengen des YKR-RK3588.
Das ieeker YKR-RK3588-Entwicklungsboard ist eine serienreife Komponente ohne Stückzahlbeschränkungen. Das für die Prototypenentwicklung verwendete Board ist identisch mit dem in der Serienfertigung ausgelieferten Board – kein Modulwechsel, keine Neugestaltung der Trägerplatine, keine separate Stückliste für die Serienfertigung. Für OEM-Programme, die kundenspezifische Formfaktoren erfordern, folgt unser RK3588-SoM-plus-Trägerplatinen-Service demselben Produktionsweg wie die YKR-RK3568-Plattform. Siehe unsere Leitfaden zum Entwurf kundenspezifischer Entwicklungsplatinen für den gesamten OEM-Workflow.
Gesamtsystemkosten bei 500 Einheiten pro Jahr
| Kostenposition | YKR-RK3588-System | Jetson Orin Nano-System |
|---|---|---|
| Rechenplatine @ 500 Stück | ~$120–140 | ~$175–200 (nur Modul) |
| Trägerplatine (Serienfertigung) | Im Lieferumfang enthalten | $30–60 zusätzlich (von Drittanbietern) |
| Aktive Kühlung (Lüfter/Kühlkörper) | $0 (nur passiv bei ≤55 °C) | $8–15 (erforderlich bei 25 W) |
| Stromversorgung (industrielle DIN-Schiene) | $12–18 (12 V/1,5 A) | $20–28 (12 V/2,5 A+) |
| Geschätzte Gesamtsumme des Systems | ~$132–158 | ~$233–303 |
| Delta pro Einheit bei 500/Jahr | $75–145 Einsparungen mit RK3588 — $37.500–72.500/Jahr | |
RK3588 vs. Jetson Orin Nano: Ein Leitfaden zur Entscheidungsfindung
Entscheiden Sie sich für den ieeker YKR-RK3588, wenn:
- Ihre KI-Workload ist YOLOv5/v8 – Klassenerkennung oder Klassifizierung bei ≤30 fps — 6 TOPS reichen aus, und RKNN-Toolkit2 lässt sich im Rahmen einer einmaligen Migration problemlos umsetzen
- Für Ihre Bereitstellung ist Folgendes erforderlich: passive Kühlung — abgedichtete DIN-Schienen-Gehäuse, Außenkioske oder jede andere Umgebung, in der ein Lüfter einen Wartungsaufwand darstellt
- Ihre Produktanforderungen Industrieschnittstellen nativ: zwei GbE-Anschlüsse, CAN-Bus, RS-485, SATA, mehrere Bildschirmausgänge – die Anbindung dieser Komponenten an den Jetson über USB-Adapter birgt Risiken hinsichtlich Zuverlässigkeit und Latenz
- Dein Das BOM-Ziel liegt unter $160/Stück bei ≤ 1.000 Stück oder wenn die Einsparung von $75–145 pro Stück Ihre Produktmarge wesentlich beeinflusst
- Du brauchst Produktionsmengen ohne Zuordnungsbeschränkungen — Da das Jetson-Entwicklungskit auf vier Einheiten begrenzt ist, muss für die Serienfertigung ein separater Beschaffungsweg eingeschlagen werden
- Zu den Anforderungen an Ihr Betriebssystem gehören Android oder eine Linux-Distribution ohne JetPack – das YKR-RK3588 wird mit Android 12-, Debian-, Ubuntu- und Buildroot-Images ausgeliefert
Entscheiden Sie sich für den Jetson Orin Nano Super, wenn:
- Für Ihre Bewerbung sind folgende Unterlagen erforderlich: Generative KI am Edge — Ausführung von LLMs (Llama 3 8B), VLMs (LLaVA) oder Vision-Transformern, die 67 TOPS und CUDA benötigen, um einen brauchbaren Durchsatz zu erzielen
- Dein Team ist bereits im NVIDIA-Ökosystem — TensorRT-Pipelines, DeepStream-Mehrkamera-Analysen oder die Isaac-ROS-Robotik-Middleware, die bereits im Einsatz sind
- Du brauchst ROS 2 mit hardwarebeschleunigter Wahrnehmung — Isaac ROS auf Jetson bietet SLAM-, Stereo-Tiefen- und Objekterkennungs-Knoten, deren Implementierung auf dem RK3588 einen erheblichen Entwicklungsaufwand erfordern würde.
- Ihre Inferenz-Workload erfordert 4 oder mehr gleichzeitige Kamerastreams bei einem Backbone vom Typ ResNet-50 oder größer – der parallele Durchsatz der CUDA-GPU bewältigt dies effizient, während RKNN eine sorgfältige Aufteilung der Ressourcen erfordern würde
- Das Budget beträgt nicht die wichtigste Einschränkung und die schnellste Zeit bis zur funktionsfähigen Demo hat oberste Priorität – dank des vorgefertigten Container-Ökosystems von JetPack sind Sie schneller einsatzbereit als bei einer RKNN-Einrichtung
IEEKER YKR-RK3588 für industrielle Edge-KI
Der ieeker Entwicklungsboard YKR-RK3588 ist die serienreife RK3588-Plattform von ieeker – eigene SMT-Fertigung, validierte BSPs (Debian 11, Ubuntu 22.04, Android 12, Buildroot), Dokumentation zum RKNN-Toolkit2-SDK sowie direkter technischer Support bei Fragen zur Modellmigration. Für Teams, die die RK3588 im Vergleich zum Jetson Orin Nano Entscheidung: Wir liefern Einzelstück-Evaluierungsboards mit vollem SDK-Zugriff und bieten Unterstützung bei der RKNN-Modellkonvertierung für Ihre spezifische Inferenz-Workload.
Für Projekte, bei denen 6 TOPS tatsächlich nicht ausreichen und die Kosten für den Jetson Orin Nano mit dem $249-Chip und dem Trägerboard akzeptabel sind – insbesondere bei generativer KI oder rechenintensiver Multi-Stream-Analyse –, ist die Jetson-Plattform die richtige Lösung, und das sagen wir auch ganz offen. Für die Mehrheit der Anwendungen in den Bereichen industrielle Bildverarbeitung, Edge-Inferenz und IoT-Gateways bietet der YKR-RK3588 jedoch den richtigen Kompromiss zwischen KI-Fähigkeit, Abdeckung industrieller Schnittstellen, Leistungsaufnahme und Bereitstellungskosten.
Sie möchten RK3588 und Jetson Orin Nano für Ihre Anwendung vergleichen?
Teilen Sie uns Ihr Inferenzmodell und Ihre Bereitstellungsumgebung mit – wir führen eine kurze RKNN-Machbarkeitsprüfung durch und sagen Ihnen ehrlich, ob die 6 TOPS des RK3588 für Ihre Arbeitslast ausreichen.
→ YKR-RK3588-Evaluierungsboard anfordern →Häufig gestellte Fragen
Ist der RK3588 für industrielle Anwendungen besser geeignet als der Jetson Orin Nano?
Für die meisten industriellen Anwendungen – industrielle Bildverarbeitung mit Standard-Bildraten, IoT-Gateways, HMI-Panels und eingebettete Steuerungssysteme – ja. Der RK3588 bietet eine bessere Abdeckung der industriellen Schnittstellen (Dual-GbE, CAN, SATA, RS-485), einen geringeren Stromverbrauch, der eine passive Kühlung ermöglicht, sowie um 40–50% niedrigere System-BOM-Kosten. Der Jetson Orin Nano Super eignet sich besser für generative KI-Workloads (LLMs, VLMs) und ROS-2-Robotik, wo das CUDA-Ökosystem von NVIDIA entscheidende Vorteile bei der Bereitstellungsgeschwindigkeit bietet.
Kann ich YOLO auf dem RK3588 ausführen?
Ja. YOLOv5s, YOLOv5m, YOLOv8n und YOLOv8s wurden alle auf der RK3588-NPU mithilfe des RKNN-Toolkit2 mit INT8-Quantisierung validiert. YOLOv5s erreicht allein auf der NPU etwa 45 ms pro Bild (22 fps). YOLOv5m läuft mit etwa 65–80 ms pro Bild (12–15 fps). Für die Fehlererkennung, die Gesichtserkennung und die allgemeine Erkennung industrieller Objekte bei branchenüblichen Bildraten sind diese Geschwindigkeiten ausreichend.
Wie groß ist der Unterschied im Stromverbrauch zwischen dem RK3588 und dem Jetson Orin Nano im praktischen Einsatz?
Bei typischen Edge-AI-Inferenz-Workloads (NPU mit einer Auslastung von 70%, zwei aktive GbE-Verbindungen, Linux-Betriebssystemdienste) hat der RK3588 eine Gesamtsystemleistungsaufnahme von 5–8 W. Der Jetson Orin Nano Super verbraucht im Standard-15-W-Modus 15 W; im MAXN-Super-Modus sind es bis zu 25 W. Praktisch bedeutet dies: Der RK3588 kann in einem Industriegehäuse bei einer Umgebungstemperatur von bis zu 55 °C passiv gekühlt werden; der Jetson Orin Nano erfordert in einem Gehäuse ab etwa 35 °C eine aktive Kühlung.
Funktioniert der Jetson Orin Nano auch ohne JetPack?
Technisch gesehen ja – Standard-Ubuntu läuft auf dem Jetson Orin Nano, aber ohne JetPack haben Sie keinen Zugriff auf CUDA, TensorRT, cuDNN, DeepStream und alle NVIDIA-spezifischen KI-Bibliotheken. Der Einsatz des Jetson Orin Nano ohne JetPack für KI-Anwendungen verfehlt dessen Hauptzweck. Für Teams, die eine Standard-Linux-Umgebung ohne NVIDIA-Abhängigkeiten benötigen, bietet der RK3588 mit Debian oder Ubuntu eine einfachere und kostengünstigere Lösung.
Wie lange dauert die Konvertierung des RKNN-Modells?
Der Konvertierungsprozess mit dem RKNN-Toolkit2 für ein Standard-YOLOv5- oder YOLOv8-Modell dauert etwa 1–3 Ingenieurtage und umfasst: ONNX-Export aus PyTorch (~1 Stunde), RKNN-Quantisierungskalibrierung mit einem repräsentativen Datensatz (~4–8 Stunden, abhängig von der Datensatzgröße), Genauigkeitsvalidierung zwischen FP32- und INT8-Modellen (~4 Stunden) sowie die Integration in die Produktions-Inferenz-Pipeline (~1 Tag). Dies sind einmalige Kosten pro Modell; nachfolgende Bereitstellungen desselben Modells erfordern keine erneute Konvertierung.
Kann der RK3588 große Sprachmodelle ausführen?
Kleine quantisierte Sprachmodelle (1–3 Mrd. Parameter, 4-Bit-Quantisierung) können auf dem RK3588 unter Verwendung von „llama.cpp“ mit CPU-Inferenz ausgeführt werden – typischerweise mit 2–5 Tokens pro Sekunde, was für die Offline-Schlüsselwort-Extraktion oder einfache Frage-Antwort-Anwendungen ausreichend ist, für interaktive Anwendungen jedoch zu langsam ist. Die 6-TOPS-NPU beschleunigt die Attention-Schichten von Transformer-Modellen nicht effizient. Für den produktiven Einsatz von LLMs am Edge ist die 67 TOPS beim Jetson Orin Nano Super mit TensorRT-LLM-Optimierung ist die passende Plattform in dieser Preisklasse.
Quellen und Referenzen
- NVIDIA Jetson Orin Nano Super Developer Kit – Offizielle Website von NVIDIA
- Jetson Orin Nano: Enorme Leistungssteigerung — NVIDIA-Entwicklerblog
- Herausforderungen bei der Edge-KI für Einsteiger mit dem Jetson Orin Nano meistern — NVIDIA
- RK3588 vs. Jetson Orin Nano: Vergleich unter realen Bedingungen — DEV Community
- RKNN-Toolkit2 – Rockchip NPU Inference SDK – GitHub
- Großes Sprachmodell – Wikipedia